Basic Electronics and Electrical Engineering: Chapter 2: DC Machines
Characteristics of DC Motor
The performance of a DC motor can be judged from its characteristics curves known as motor characteristics.
DC
MOTOR CHARACTERISTICS
The performance of a DC
motor can be judged from its characteristics curves known as motor
characteristics. Following are the three important characteristics of a DC
motor.
1. Torque and Armature
current characteristic (Ta/Ia)
It is also known as
electrical characteristic of the motor.
2. Speed and Armature
current characteristic (N/Ia)
3. Speed and Torque
characteristic (N/Ta)
It is also known as
mechanical characteristic of the motor.
1. Characteristics of DC Series Motor
1. Ta/Ia characteristic
We know that Ta
∝ Ia

In this case, as field
windings also carry the armature current.
Upto magnetic
saturation, ϕ ∝ Ia
so that Ta ∝I2a.
After magnetic
saturation, ϕ is constant, so that Ta ∝ Ia
Thus upto magnetic
saturation, the armature torque is proportional to the square of armature
current. If Ia increases, Ta increases as the square of
the current. Hence Ta/Ia curve is a parabola as shown in
Fig. 2.38. After magnetic saturation, torque is directly proportional to the
armature current. Therefore, Ta/Ia curve after magnetic
saturation is a straight line. (portion AB of the curve).
It may be seen that in
the initial portion of the curve (up to magnetic saturation), Ta ∝ I2a.
This means that starting torque of a DC series motor will be very high as
compared to a shunt motor..
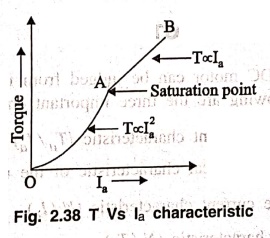
The shaft torque Tsh
is less than armature torque due to stray losses. It is shown dotted in the
figures.
So we conclude, that where
high starting torque is required for accelerating heavy masses quickly as in
hoists and electric trains etc, series motors are used.
2. N/Ia Characteristic
The speed N of a series
motor is given by.
N ∝ Eb/ϕ
where Eb = V
‒ Ia(Ra + Rse).
When Ia
increases, the back emf, Eb decreases due to Ia(Ra+Rse)
drop while the flux ϕ increases. However, Ia(Ra + Rse)
drop is small under normal conditions and may neglected.
With increased Ia,
ϕ also increases. Hence, speed varies inversely as armature current as shown in
Fig. 2.39.

When Load is heavy, Ia
is large and ϕ is high. Hence the is speed low. But when the load current falls
and hence Ia falls to a small value, speed becomes dangerously high.
Hence a series motor should never be started without some mechanical load on
it. It should be noted that series motor is a variable speed motor.
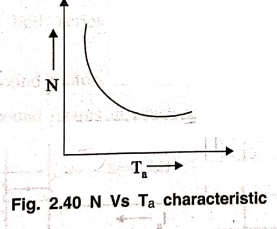
3. N/Ta or Mechanical Characteristic
It is found from the
above characteristic curves that when speed is high, torque is low and vice‒versa.
The relationship between these two is shown in Fig. 2.40.
2. Characteristics of DC Shunt Motor
1. Ta/la Characteristic

We know that in a DC
motor,
Ta ∝ la
Since the motor is
operating with a constant supply voltage, flux ϕ is constant (neglecting
armature reaction)
:. Ta ∝ la
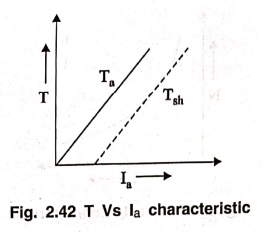
Hence Ta/Ia
characteristic curve is a straight line passing through the origin as shown
clear in Fig. 2.42. The shaft torque (Tsh) is less than Ta
and is shown by a dotted line. It is clear from the curve that a very large
current is required to start a heavy load. Therefore, a shunt motor should not
be started on (heavy) load.
2. N/Ia characteristic

The speed N of a DC
motor is given by
N ∝ Eb / ϕ
The flux ϕ and back emf
Eb in a shunt motor are almost constant under normal conditions.
Therefore speed of a shunt motor will remain constant as the armature current
varies as shown in Fig. 2.43.
But strictly speaking,
both Eb (Eb = V ‒ IaRa) and ϕ decrease
with increase in load due to the armature resistance drop and armature reaction
respectively. However, Eb decreases slightly more than ϕ so that the
speed of the motor decreases slightly with load as shown in dotted line.
3. N/Ta characteristic
The curve is obtained
by plotting the values of N and Ta for various armature currents. It
may be seen that speed falls some what as the load torque increases.
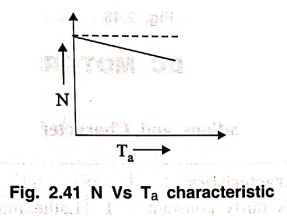
From their
characteristic curve the following points can be observed.
(i) There is slight
change in the speed of a shunt motor from no load to full load. Hence it is
essentially a constant speed motor.
(ii) The starting torque is not high because Ta ∝ Ia.
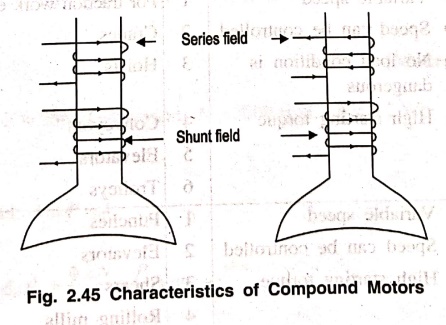
3. Characteristics of Compound Motors
A compound motor has
both series and shunt field winding, compound motors are of two types.
1. Cumulative ‒ Compound motors in which series field flux aids the
shunt field flux.
2. Differential ‒ Compound motors in which series field flux opposes
the shunt field flux.
This type of motor has
the combination of characteristics of series and shunt motors. As the load is
increased, the combined flux increases if cumulatively compounded and causes a
torque greater. At the same time, the increase in flux causes the speed to fall
more rapidly. The characteristic curves of a DC compound motors are shown in
Fig. 2.46.
Basic Electronics and Electrical Engineering: Chapter 2: DC Machines : Tag: Basic Engineering : - Characteristics of DC Motor
Basic Electronics and Electrical Engineering: Chapter 2: DC Machines
Under Subject

Basic Electronics and Electrical Engineering
EE25C04 1st Semester ECE Dept | 2025 Regulation | 2nd Semester 2025 Regulation
Related Subjects

English Essentials I
EN25C01 1st Semester | 2025 Regulation | 1st Semester 2025 Regulation

தமிழர் மரபு - Heritage of Tamils
UC25H01 1st Semester | 2025 Regulation | 1st Semester 2025 Regulation
Applied Calculus
MA25C01 Maths 1 M1 - 1st Semester | 2025 Regulation | 1st Semester 2025 Regulation
Applied Physics I
PH25C01 1st Semester | 2025 Regulation | 1st Semester 2025 Regulation

Applied Chemistry I
CY25C01 1st Semester | 2025 Regulation | 1st Semester 2025 Regulation

Makerspace
ME25C04 1st Semester | 2025 Regulation | 1st Semester 2025 Regulation
Computer Programming C
CS25C01 1st Semester | 2025 Regulation | 1st Semester 2025 Regulation
Computer Programming Python
CS25C02 1st Semester | 2025 Regulation | 1st Semester 2025 Regulation
Fundamentals of Electrical and Electronics Engineering
EE25C03 1st Semester | 2025 Regulation | 1st Semester 2025 Regulation
Introduction to Mechanical Engineering
ME25C03 1st Semester | 2025 Regulation | 1st Semester 2025 Regulation

Introduction to Civil Engineering
CE25C01 1st Semester Civil Department | 2025 Regulation | 1st Semester 2025 Regulation
Essentials of Computing
CS25C03 1st Semester - AID CSE IT Department | 2025 Regulation | 1st Semester 2025 Regulation

Applied Physics I Laboratory
PH25C01 1st Semester practical Laboratory Manual | 2025 Regulation | 1st Semester Laboratory 2025 Regulation

Applied Chemistry I Laboratory
CY25C01 1st Semester practical Laboratory Manual | 2025 Regulation | 1st Semester Laboratory 2025 Regulation

Computer Programming C Laboratory
CS25C01 1st Semester practical Laboratory Manual | 2025 Regulation | 1st Semester Laboratory 2025 Regulation

Computer Programming Python Laboratory
CS25C02 1st Semester practical Laboratory Manual | 2025 Regulation | 1st Semester Laboratory 2025 Regulation
Engineering Drawing
ME25C01 EEE Mech Dept | 2025 Regulation | 2nd Semester 2025 Regulation
Basic Electronics and Electrical Engineering
EE25C04 1st Semester ECE Dept | 2025 Regulation | 2nd Semester 2025 Regulation