Basic Electronics and Electrical Engineering: Chapter 2: DC Machines
Torque and Speed Equations of DC Motor
Torque is the turning or twisting moment of a force about an axis.
TORQUE AND SPEED EQUATIONS
Torque is the turning
or twisting moment of a force about an axis. It is measured by the product of
the force and the radius at which this force acts.
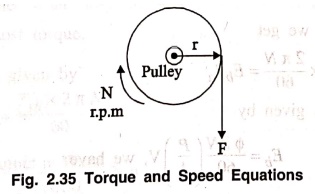
Consider a pulley of
radius r metre acted upon by a circumferential
force of F newton which causes it to rotate at speed N rpm.
Torque T= F×r Newton ‒ metre (Nm)
Work done by this force
in one revolution.
= Force × distance
= F × 2πr Joules
and P = Power developed
= Work done / time
= F×2πг / time for one revolution
= F×2πг / (60/N)
= (F×r) × (2πΝ/60)
∴
P=T×W watts
where,
T= Torque in Nm
ω = Angular speed in
rad/sec = 2πΝ / 60
∴ P = 2πΝΤ / 60
W
1. Armature Torque of a motor
Let Ta be
the gross torque developed by the armature of motor running at N r.p.m. It is
also called armature torque.
Power developed in
armature = Ta (2πΝ / 60) W
We also know that
electrical power converted into mechanical power in the Armature = EbIa
W
Equating (i) and (ii)
we get
Ta × [2πΝ / 60] = EbIa
but Eb in a
motor is given by
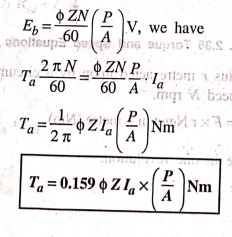
This is the armature
torque equation of DC motor.
From the above equation
it is clear that
Ta ∝ Ia
(i) In case of series
motor ϕ ∝ Ia
∴
Ta ∝
I2a
(ii) In case of shunt
motor flux is practically constant,
∴
Ta ∝
Ia
2. Shaft Torque (Tsh)
The torque which is
available for doing useful work is known as Shaft Torque (Tsh).
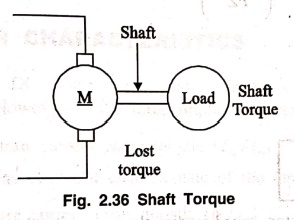
The gross torque Ta
developed in the armature of a motor is not available at the shaft because a
part of it is lost, in overcoming the iron and frictional losses in the motor.
Therefore, shaft torque Tsh is some what less than the armature
torque, Ta. The difference (Ta‒Tsh) is known
as Lost torque,
The motor output is
given by
Output = Tsh×2πN
/ 60
Tsh =
(output in Watts) / (2πN/60) Nm.
Tsh = 9.55 ×
(output in Watts / N) Nm
1. Speed of a DC Motor
From the voltage
equation of a motor, we get,
Eb = V ‒ laRa
But,

N ∝
k
Eb/ϕ
or
N
∝
Eb/ϕ
Therefore, in a DC
motor, speed is directly proportional to back emf, Eb and inversely
proportional to flux per pole.
2. Speed Relations
If a DC motor has
initial values of speed, flux per pole and back emf as N1, ϕ2
and Eb1 respectively and the corresponding final values as N2,
ϕ2 and Eb2, then
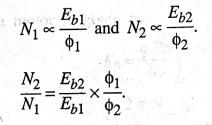
For a shunt motor, flux
practically remains constant so that,
ϕ1 = ϕ2
N2 / N1
= Eb2 / Eb1
For a shunt motor, ϕ ∝ I prior to saturation.
N2 / N1
= Eb2/Eb1 × Ia1/Ia2

where,
Ia1 =
Initial armature current.
Ia2 = Final
armature current.
Speed Regulation
The speed Regulation is
defined as the change in speed when the load on the motor is reduced from rated
value to zero, expressed as percent of the rated load speed.
% Speed regulation = [ (No load speed ‒ Full
load speed) / Full load speed ] × 100

Basic Electronics and Electrical Engineering: Chapter 2: DC Machines : Tag: Basic Engineering : - Torque and Speed Equations of DC Motor
Basic Electronics and Electrical Engineering: Chapter 2: DC Machines
Under Subject

Basic Electronics and Electrical Engineering
EE25C04 1st Semester ECE Dept | 2025 Regulation | 2nd Semester 2025 Regulation
Related Subjects

English Essentials I
EN25C01 1st Semester | 2025 Regulation | 1st Semester 2025 Regulation

தமிழர் மரபு - Heritage of Tamils
UC25H01 1st Semester | 2025 Regulation | 1st Semester 2025 Regulation
Applied Calculus
MA25C01 Maths 1 M1 - 1st Semester | 2025 Regulation | 1st Semester 2025 Regulation
Applied Physics I
PH25C01 1st Semester | 2025 Regulation | 1st Semester 2025 Regulation

Applied Chemistry I
CY25C01 1st Semester | 2025 Regulation | 1st Semester 2025 Regulation

Makerspace
ME25C04 1st Semester | 2025 Regulation | 1st Semester 2025 Regulation
Computer Programming C
CS25C01 1st Semester | 2025 Regulation | 1st Semester 2025 Regulation
Computer Programming Python
CS25C02 1st Semester | 2025 Regulation | 1st Semester 2025 Regulation
Fundamentals of Electrical and Electronics Engineering
EE25C03 1st Semester | 2025 Regulation | 1st Semester 2025 Regulation
Introduction to Mechanical Engineering
ME25C03 1st Semester | 2025 Regulation | 1st Semester 2025 Regulation

Introduction to Civil Engineering
CE25C01 1st Semester Civil Department | 2025 Regulation | 1st Semester 2025 Regulation
Essentials of Computing
CS25C03 1st Semester - AID CSE IT Department | 2025 Regulation | 1st Semester 2025 Regulation

Applied Physics I Laboratory
PH25C01 1st Semester practical Laboratory Manual | 2025 Regulation | 1st Semester Laboratory 2025 Regulation

Applied Chemistry I Laboratory
CY25C01 1st Semester practical Laboratory Manual | 2025 Regulation | 1st Semester Laboratory 2025 Regulation

Computer Programming C Laboratory
CS25C01 1st Semester practical Laboratory Manual | 2025 Regulation | 1st Semester Laboratory 2025 Regulation

Computer Programming Python Laboratory
CS25C02 1st Semester practical Laboratory Manual | 2025 Regulation | 1st Semester Laboratory 2025 Regulation
Engineering Drawing
ME25C01 EEE Mech Dept | 2025 Regulation | 2nd Semester 2025 Regulation
Basic Electronics and Electrical Engineering
EE25C04 1st Semester ECE Dept | 2025 Regulation | 2nd Semester 2025 Regulation